Lo sviluppo della robotica collaborativa ha ormai ridefinito il rapporto tra uomo e macchina.
Un paradigma che prevede la stretta cooperazione tra sistemi robotici e lavoro umano, permettendone anche l’interazione fisica in spazi ristretti.
Bisogna però evidenziare come non esistano macchine “collaborative” per natura. Un robot può infatti essere progettato per un compito collaborativo, ma è l’applicazione che fa tutto il lavoro.
È l’applicazione che rende il robot “collaborativo”.
Ruolo fondamentale, in questo frangente, è giocato dall’intelligenza artificiale che quindi, anche in applicazione alla robotica collaborativa, si inserisce tra le tecnologie abilitanti dell’Industria 4.0.
IA e differenze tra robot tradizionali e Cobot
È proprio l’intelligenza artificiale a permettere, dunque, la creazione di macchine intelligenti in grado di lavorare e reagire come gli essere umani, oltre che di interagire con loro.
La gestione dei robot collaborativi (Cobot) è inoltre resa più semplice dalla loro capacità di acquisire informazioni, per poter interpretare il mondo che li circonda e decidere quale azione intraprendere.
Questo il concetto alla base del Machine Learning, branca dell’intelligenza artificiale basata proprio sull’apprendimento automatico da parte delle macchine.
Grazie all’IA, in definitiva, gli utenti non sono più tenuti a conoscere software o linguaggi di programmazione, ma è sufficiente che mostrino al robot che cosa deve fare.
A questa, si aggiungono poi tre grosse differenze tra i robot cosiddetti “tradizionali” e i Cobot;
- Flessibilità: Leggeri e di piccole dimensioni, i Cobot possono agire anche in spazi ridotti e, in caso di loro spostamento, possono essere facilmente riprogrammati.
- Prontezza all’uso: I Cobot, non richiedendo complesse modifiche degli schemi produttivi, possono essere messi in opera molto velocemente e sono integrabili rapidamente nelle aree di lavoro.
- Sicurezza: I Cobot, a differenza dei robot tradizionali, possono operare senza l’uso di barriere o gabbie protettive. Essi possono inoltre essere equipaggiati con una serie di sensori e visori che ne aumentano efficacia operativa e sicurezza
Proprio quest’ultimo è il caso del visore 3D con IA on Board, brevettato da Noitech e montato sul mobot/Cobot todrobot TR1.
Robotica collaborativa e interazione fisica uomo-robot
La robotica collaborativa permette pertanto una interazione fisica sicura con l’uomo.
I Cobot, condividendo lo spazio con gli operatori umani, hanno aperto la strada ad una modalità diversa di impiego della robotica in ambito industriale e non solo.
Nell’interazione fisica uomo-robot (PhHRI, ovvero Physical Human-Robot Interaction), gli aspetti della percezione dell’ambiente e la previsione dell’intenzione umana rappresentano un requisito fondamentale.
Ed è così che il binomio uomo-robot produce benefici in una duplice direzione:
- L’uomo può essere sollevato da operazioni gravose, come il trasferimento e la manipolazione di carichi elevati, l’esecuzione di mansioni ripetitive ed usuranti, ecc;
- Il robot può beneficiare delle abilità individuali dell’uomo, in grado di prevedere e risolvere situazioni imprecise, per adattarsi alla flessibilità e alla variabilità dei compiti.
Le sfide dell’IA per la robotica collaborativa
Delle sfide che attendono l’intelligenza artificiale si è parlato nel corso di un convegno, organizzato da Siri (Associazione Italiana di Robotica e Automazione), in occasione della 33° edizione di BiMu.
A spiccare è quella circa la percezione dell’ambiente, ovvero la capacità del robot di pianificare e prendere decisioni in autonomia.
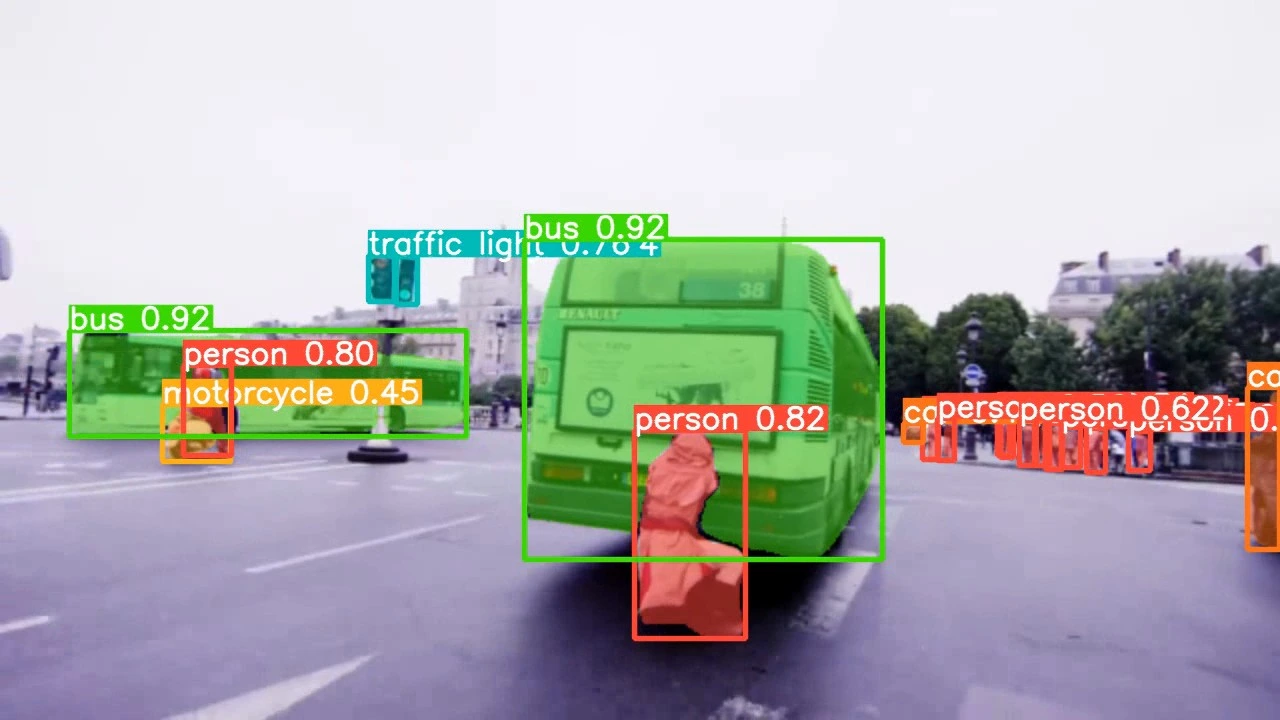
Negli ultimi 10 anni, con l’esplosione del Machine Learning, del Deep Learning, e della Computer Vision, l’intelligenza artificiale ha fatto passi da gigante.
I miglioramenti ottenuti nel campo della visione artificiale, soprattutto, permettono oggi alle macchine di interpretare situazioni anche molto complesse. Tutto ciò ha permesso di abilitare quel ciclo di percezione, ragionamento e azione, necessario allo svolgimento di task sempre più complicati e a perfezionare l’interazione uomo-macchina.
La sfida lanciata dal BiMu è quella di oltrepassare l’attuale livello di interazione, per ottenere un’automazione che vede il robot svolgere task in maniera autonoma.
Punto di arrivo è quello che viene definito “human in the execution loop”, dove uomini e robot lavorano nello stesso ambiente, ma senza condivisione a livello decisionale.
Per affrontare queste sfide, come affermato da Domenico Appendino, Presidente di Siri, occorre promuovere la collaborazione tra il mondo accademico e quello industriale «che nel nostro Paese spesso viaggiano ancora su due binari separati».
Un mantra, questo, che Noitech ha da sempre fatto suo. È infatti proprio dal reparto In House di Ricerca e Sviluppo, composto da accademici e ingegneri, che nascono le nostre soluzioni tecnologiche avanzate.